Accueil > Publications > Roulement sans glissement.
 Roulement sans glissement.
Roulement sans glissement.
Comment interpréter l’hypothèse "Rouler sans glisser" ?
dimanche 28 août 2016, par
.
Objectif : Montrer que pour tout point ![]() de coordonnées polaires
de coordonnées polaires ![]() appartenant à une cardioïde
appartenant à une cardioïde ![]() .
.
Je soumets ici ma réflexion aux regards de ceux qui pourraient apporter des corrections ou des simplifications. Car il est possible que je sois passé à côté de quelque chose de plus simple.
"Rouler sans glisser" !
J’avais et j’ai passé beaucoup de temps à essayer d’interpréter cette hypothèse qui pour moi n’avait rien d’évidente. Après quelques semaines de réflexion et finalement 4 jours en août, je me suis rappelé que cette notion devait être définie dans le cours de mécanique :
On fait intervenir la vitesse de glissement ![]() d’une surface
d’une surface ![]() sur une autre
sur une autre ![]() relativement à un référentiel
relativement à un référentiel ![]() .
.
Elle est définie par ![]() .
.
![]() et
et ![]() sont respectivement les points de
sont respectivement les points de ![]() et
et ![]() en contact,
en contact, ![]() et
et ![]() leur vitesse dans
leur vitesse dans ![]() .
.
Si ![]() , il n’y a pas glissement sinon, il y a glissement.
, il n’y a pas glissement sinon, il y a glissement.
Pour travailler, j’ai besoin de deux référentiels, ![]() et
et ![]() avec deux bases unitaires directes.
avec deux bases unitaires directes.
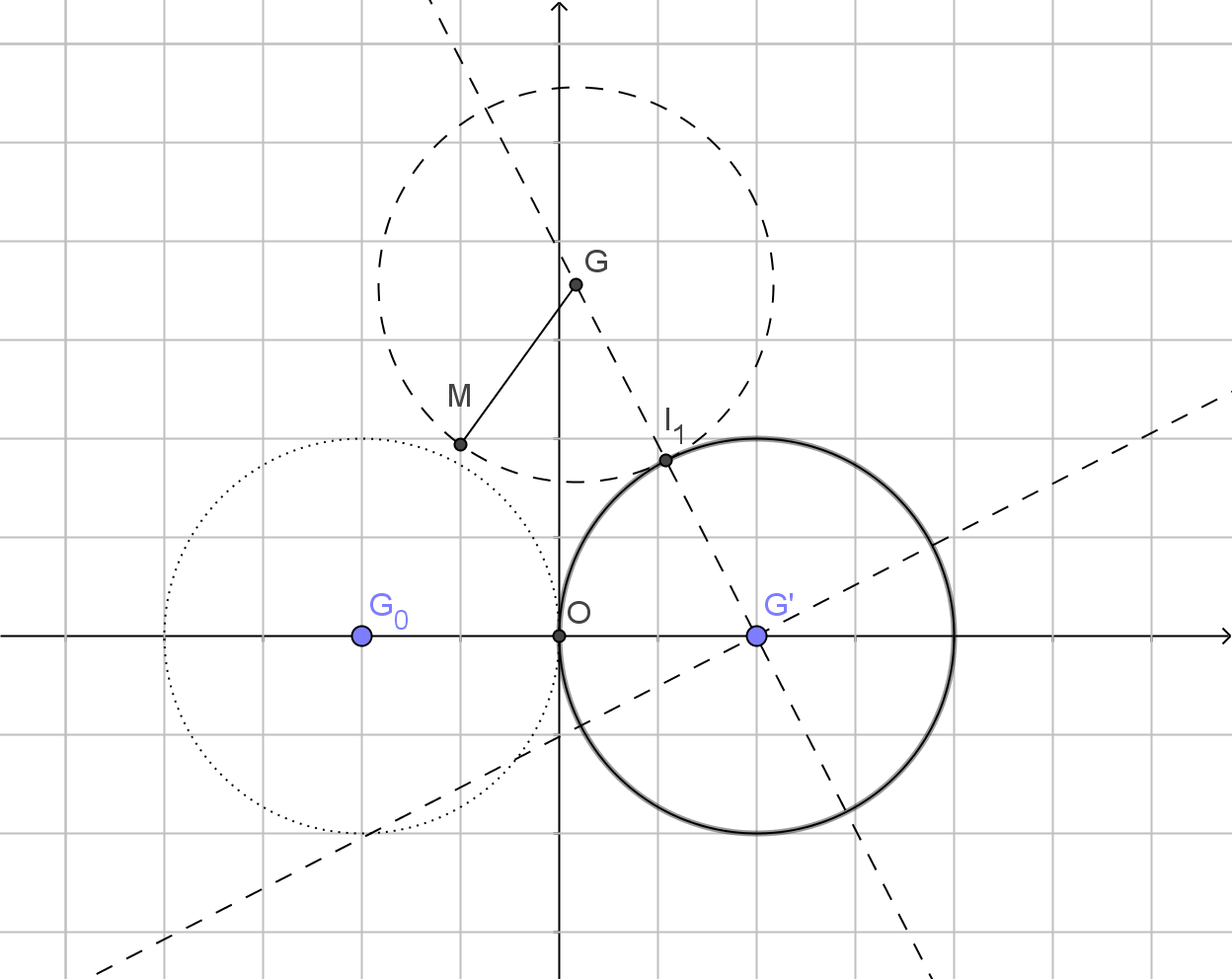
Le cercle immobile est ![]() de centre
de centre ![]() ,
, ![]() lui est associé.
lui est associé.
Le cercle qui roule est ![]() de centre
de centre ![]() ,
, ![]() lui est associé.
lui est associé.
En coordonnées polaires ![]() et
et ![]()
(Ensuite dire que le cercle cercle ![]() roule sur
roule sur ![]() ne me parait pas suffisant, je rajoute qu’il doit avoir une vitesse angulaire constante. [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante]).
ne me parait pas suffisant, je rajoute qu’il doit avoir une vitesse angulaire constante. [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante]).
C’est à dire ![]() constant [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante].
constant [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante].
Puisqu’il n’y a pas glissement et que ![]() est immobile
est immobile ![]() est équivalent à
est équivalent à ![]() .
.
En dérivant dans ![]() chaque membre de
chaque membre de ![]() , on arrive à l’égalité :
, on arrive à l’égalité :
![]() .
.
Autement dit, la vitesse angulaire de ![]() dans
dans ![]() est aussi constante [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante].
est aussi constante [Remarque à supprimer car rien ne justifie d’imposer une vitesse Constante].
Voilà, c’est le résultat que me manquait.
Ensuite, je reprends comme dans la correction.
En notant ![]() avec leur affixe dans
avec leur affixe dans ![]() , nous obtenons :
, nous obtenons :
![]() ,
, ![]() est introduit simplement pour respecter les conditions initiales à
est introduit simplement pour respecter les conditions initiales à ![]() .
.
![]() puisque
puisque ![]() .
.
Mais on peut également écrire ![]() .
.
On factorise le second membre par ![]() pour obtenir :
pour obtenir :
![]() car
car ![]()
Par identification ![]() et
et ![]() .
.
Qu’en pensez-vous ?